以第一作者在国际控制领域顶级期刊IEEE TAC、IEEE THP、IEEE TFS、IRCA等发表论文20余篇,授权发明专利2项, 代表性成果如下:
期刊论文:
[1] Wei Yan, Feng Yu, Ou Linlin, Wang Yueying, and Yu Xinyi. Explicit Solution of Tunable Input-to-State Safe-Based Controller Under High -Relative-Degree Constraints[J]. IEEE Transactions on Automatic Control, 2025, 1-8. (SCI, Q1, TOP)
[2] Wei Yan, Feng Yu, Ou Linlin, Wang Yueying, and Yu Xinyi. DIBLF-Based Adaptive Optimal Constrained Control for Collaborative Robots Under Different Human-Robot Interactive Tasks[J]. IEEE Transactions on Haptics, 2025, 1-12. (SCI, Q1, TOP)
[3] Wei Yan, Wang Yueying, Ahn Choon Ki, and Duan Dengping. IBLF-Based Finite-Time Adaptive Fuzzy Output-Feedback Control for Uncertain MIMO Nonlinear State-Constrained Systems[J]. IEEE Transactions on Fuzzy Systems, 2021,29(11):3389-3400. (SCI, Q1, TOP)
[4] Wei Yan, Zhou Pingfang, Liang Yinzheng, Wang Yueying, and Duan Dengping. Adaptive Finite-Time Neural Backstepping Control for Multi-Input and Multi-Output State-Constrained Nonlinear Systems Using Tangent-Type Nonlinear Mapping [J]. International Journal of Robust and Nonlinear Control, 2020, 30(14): 5559-5578. (SCI, Q1, TOP)
[5] Wei Yan, Yu Xinyi, Feng Yu, Chen Qiang, Ou Linlin, and Zhou Llibo. Event-Triggered Adaptive Optimal Tracking Control for Nonlinear Stochastic Systems with Dynamic State Constraints[J].ISA Transactions, 2023,139: 60-70. (SCI, Q1, TOP)
[6] Wei Yan, Luo Jun, Yan Huaicheng, and Wang Yueying. Event-Triggered Adaptive Finite-Time Control for Nonlinear Systems Under Asymmetric Time-Varying State Constraints[J]. Frontiers of Information Technology and Electronic Engineering (信息与电子工程前沿), 2021,22(12):1610-1624. (SCI, Q2, 中国卓越期刊)
[7] Wei Yan, Fu Jun, Yan Huaicheng, Wang Yueying. Adaptive Neural Fault‐Tolerant Optimal Control for Nonlinear Uncertain Systems with Dynamic State Constraints[J]. International Journal of Robust and Nonlinear Control. 2023,33(14): 8400-8420. (SCI, Q1, TOP)
[8] Wei Yan, Hao Mingshuang, Yu Xinyi, and Ou Linlin. ATIBLF-Based Adaptive Optimal Control for Nonlinear Systems with Dynamic State Constraints[J]. Frontiers of Information Technology & Electronic Engineering (信息与电子工程前沿), 2024, (SCI, Q2,中国卓越期刊)
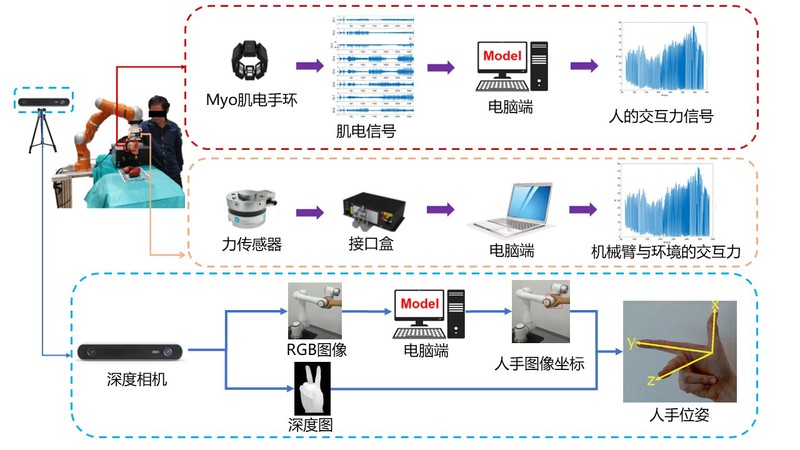
[9] Wei Yan, Hao Mingshuang, Jin Kehong, Yu Xinyi, and Ou Linlin. Output-Constrained Adaptive Optimal Control for Physical Human-Robot Interaction Using Electromyography Signals[J]. Asian Journal of Control, 2025. (SCI, Q3)
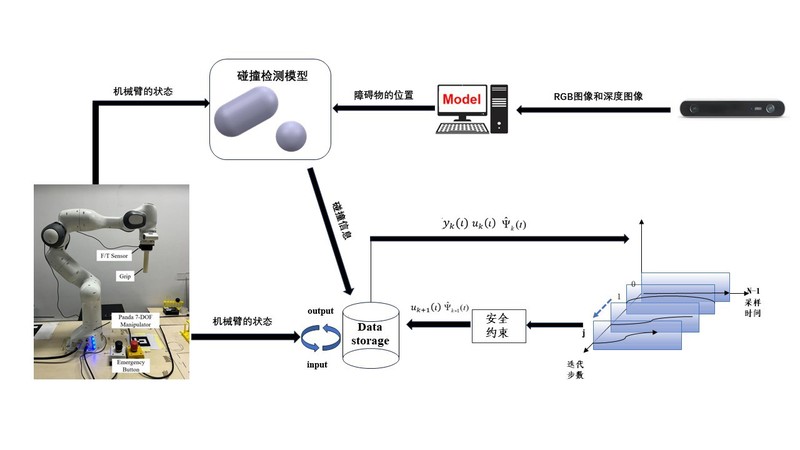
[10] 魏岩, 俞佳琪, 禹鑫燚, 欧林林. 干扰环境下的机械臂全身动态避障与安全柔顺控制方法[J].控制与决策, 2025, 1-12.
会议论文
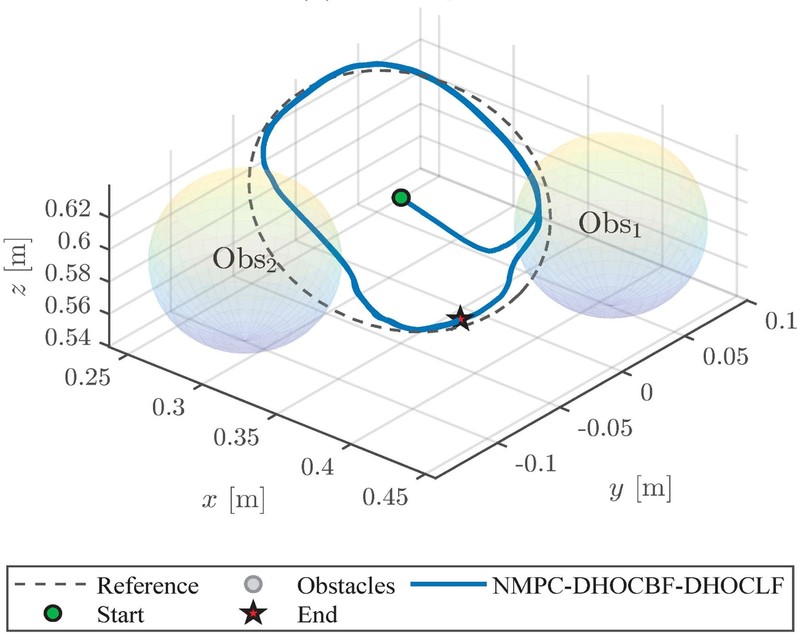
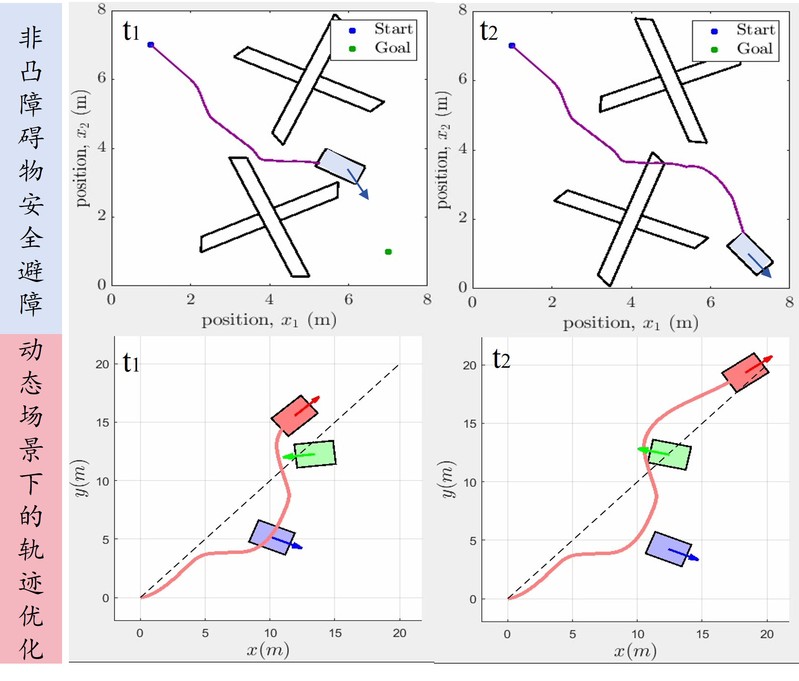
[1] Wei Yan, Yao Jiajie, Yu Xinyi, and Linlin Ou. Safe Robotics Control with Directional Projection Control Barrier Functions via Differentiable Optimization[C]. IEEE International Conference on Robotics and Automation (ICRA), 2026, 1-8. Accepted. (国际机器人顶会)
发明专利
[1] 魏岩, 姚家杰, 欧林林, 禹鑫燚. 一种基于高阶控制障碍函数的机械臂安全避障控制方法和系统(ZL202411837262.3).
[2] 魏岩, 卢贤龙, 郝明爽, 禹鑫燚, 欧林林. 考虑动态约束的机器人自适应神经最优跟踪控制方法和装置(ZL202411816624.0)
[3] 魏岩,俞佳琪,郝明爽,张永琪,欧林林,禹鑫燚,周利波. 一种基于肌电手环和深度相机的手部肌力向量估计方法 (CN202310961956).
[4] 王曰英,魏岩,周卫祥. 一种无人潜航器布放回收系统及布放回收方法(ZL202011575055.7).